Inbetriebnahme der Beckhoff AX5206 Servoverstärker
Einleitung
Dieser Artikel beschreibt die Inbetriebnahme der AX5602 Servoverstärker mit den Rotationsmotoren AM3032-0D30-0000 der Firma Beckhoff. Mögliche Anpassungen für den Betrieb der Copley STA2504P-516-S-S3F Linearmotoren wurden noch nicht eingepflegt.
Vorbereitung
Anleitung
Automatisches anlegen der Systemkonfiguration
- Als erstes den System Manager mittels Kontextmenü aus dem Windows Info Bereich starten:

- Wähle Datei -> Neu und anschließend den System Manager im Konfig Modus starten:

- Im Kontextmenü von E/A Geräte -> Geräte suchen wählen:

- Anschließend sucht TwinCat selbstständig nach angeschlossenen Geräten an allen konfigurierten Feldbuskarten. Die nun angezeigten Warn- und Hinweismeldungen können mit Ja/OK beantwortet werden, sodass automatisch alle erforderlichen Achsen in der NC - Konfiguration erstellt werden. Am Ende findet man sich im Freerun Modus wieder:

- Nun die gerade automatisch erstellte Konfiguration aktivieren - Infoboxen alle mit OK/Ja wegklicken:

Die Grundlegenden Konfigurationsstrukturen zum Betrieb des Systems sind nun von TwinCAT in der linken Spalte erstellt worden. Nun geht es daran die speziellen Achseinstellungen einzupflegen...
Erweitere Konfiguration der Achsen
- Zur weiteren Konfiguration den Encoder der ersten Achse unter "NC - Konfiguration -> NC - Task 1 SVB -> Achsen -> Achse 1 -> Achse 1_Enc" auswählen und in der Registerkarte "Global" den Skalierungsfaktor setzen. Für den im Beckhoff AM3032-0D30-0000 eingesetzten Encoder ergibt sich der dargestellte Wert:
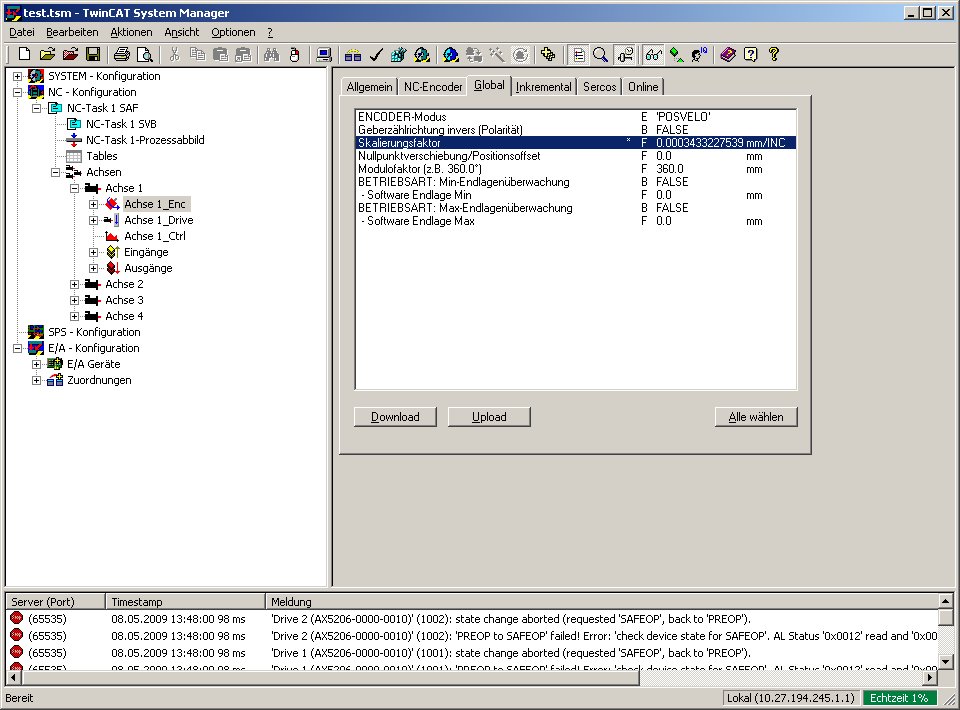

Zum Schluss noch auf "Alle wählen" klicken, dann "Download" und beim erscheinenden Fenster mit "Jetzt sichern" bestätigen. Der Skalierungsfaktor gibt an, wie viele mm, m oder ° einem Inkrement des Encodersignals entsprechen. Siehe dazu Berechnung des Skalierungsfaktors
- Nun eine Ebene höher zu "NC - Konfiguration -> NC - Task 1 SVB -> Achsen -> Achse 1" wechseln. Hier in der Registerkarte "Einstellungen" Einheit und Anzeige wie gezeigt modifizieren:
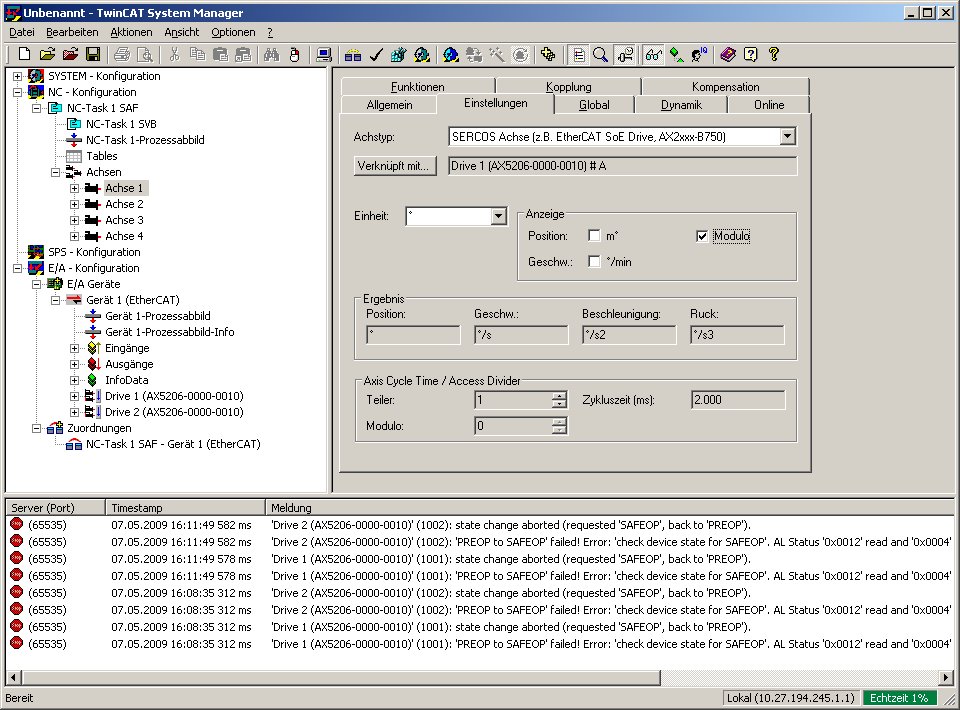

Die hier gewählte Einheit muss mit dem Skalierungsfaktor des Encoders bzw. mit der Berechnung des Skalierungsfaktors zusammenpassen.
- In der Registerkarte "Global" sind nun die Geschwindigkeits- und Überwachungsparameter zu setzen. Diese lassen sich aus dem Datenblatt des Antriebs und der vorher gewählten Einheit errechnen. Für den Beckhoff AM3032-0D30-0000 können die angezeigten Werte übernommen werden:
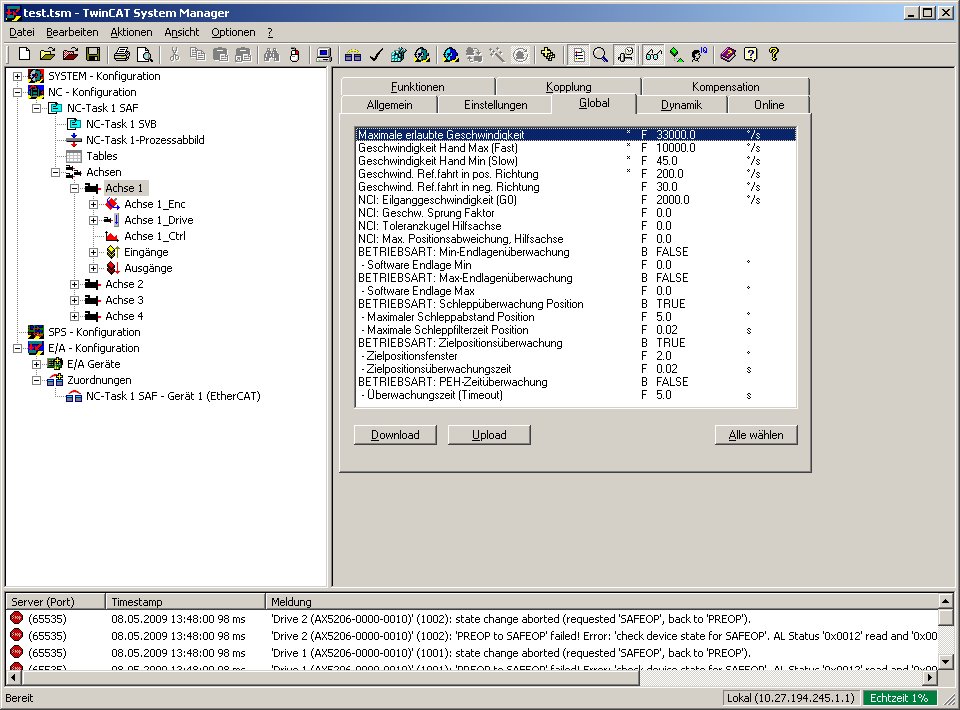

Auch hier am Ende wieder "Alle wählen", "Download" und "Jetzt sichern" anklicken.
Die Maximal erlaubte Geschwindikeit muss mithilfe des Datenblatts des Antriebs ausgerechnet werden. Die beiden nächsten Werte beziehen sich auf den Handbetrieb innerhalb des System Managers. Werte 4 und 5 sind für die Referenzfahrt. Zu erwähnen ist hier noch die Möglichkeit der Schlepp- und Zielpositionsüberwachung.
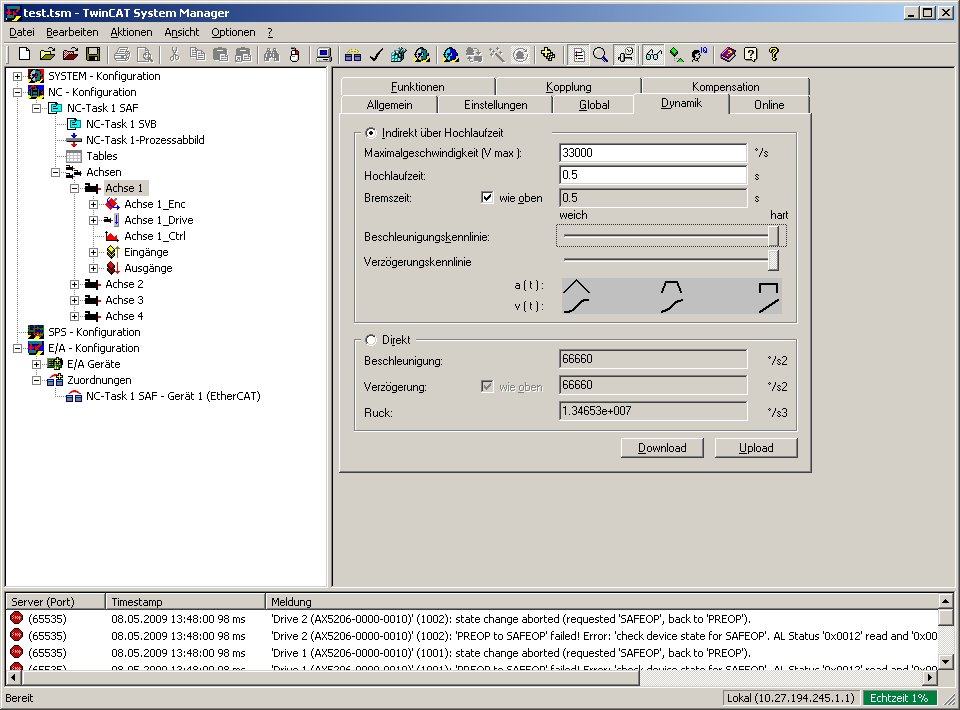
- Weiter gehts in der Registerkarte "Dynamik". Hier wird die Härte des Anlaufs bzw. des Abbremsen des Antriebs mit den beiden Schiebereglern bzw. Hochlaufzeit/Bremszeit eingestellt. Gemäß der gerade eben gesetzten Schlepppositionsüberwachung sind die hier gezeigten Werte für den Beckhoff AM3032-0D30-0000 akzeptabel:

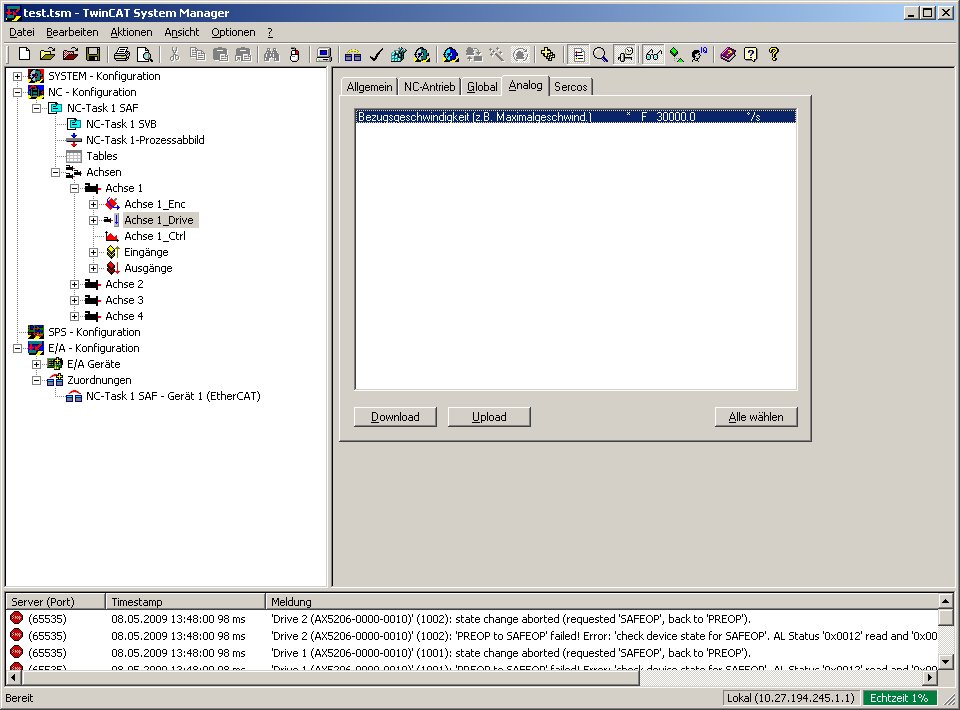
- Nun wieder eine Ebene tiefer zu "NC - Konfiguration -> NC - Task 1 SVB -> Achsen -> Achse 1 -> Achse 1_Drive" springen. Hier in Registerkarte "Analog" eine Bezugsgeschwindigkeit kleiner oder gleich der Maximalgeschwindikeit eintragen und mit "Alle wählen", "Download" und "Jetzt sichern" übernehmen:

- Unterhalb der NC - Konfiguration ist nun alles erledigt.