Hardware: Unterschied zwischen den Versionen
(Beschreibung der Gegner-Erkennung) |
(Beschreibung der Ballerkennung) |
||
| Zeile 15: | Zeile 15: | ||
== Gegner-Erkennung == |
== Gegner-Erkennung == |
||
Die |
Die Stellungen der Spielstangen des menschlichen Spielers ermitteln wir jeweils mit Hilfe von zwei Laser-Distanz-Sensoren (Typ: [http://www.baumer.com Baumer] OADM 13U7480/S35A). Dafür sind an den Enden der Stangen Kunststoff-Schnecken angebracht. Die Schnecken werden mit einem Sensor an der Fläche in der Mitte und mit dem anderen Sensor an der umlaufenden schiefen Ebene abgetastet. Aus der Distanz zwischen Laser-Sensor und der Mitte der Schnecke, bestimmen wir die Position der Stange in Längsrichtung. Aus der Differenz der Distanz in der Mitte und der Distanz zur umlaufenden Ebene berechnen wir den Winkel der Spielstange. |
||
<gallery> |
<gallery> |
||
| Zeile 24: | Zeile 24: | ||
== Ballerkennung == |
== Ballerkennung == |
||
Um die Position des Balles zu bestimmen, haben wir zwei Kameras (Typ: [http://www.vrmagic.com VRmagic] VRmFC-12/BW) in zwei Ecken des Spielfeldes montiert. Diese beobachten das Spielfeld durch einen schmalen Schlitz in der Bande. Bereits auf den Kameras selbst werden die Bilder vor bearbeitet, so dass die [[Software#Ballerkennung|Software]] nur noch einen schmalen schwarzen Streifen mit einem weißen Fleck (Ball) auswerten muss. |
|||
<gallery> |
<gallery> |
||
Datei: |
Datei:Embedded Kamera.JPG|Embedded-Kamera |
||
Datei:Kamera_montiert.JPG|Kamera montiert |
|||
Datei:Ballerkennung_Kamerapositionierung.png|Positionierung der Kameras |
|||
</gallery> |
</gallery> |
||
Version vom 30. August 2013, 09:10 Uhr
HomeNewsHardwareSoftwareBilderÜber uns
Spielstangen-Aktorik
Eine große Herausforderung bei der Umsetzung des Projekts war die Realisierung der Antriebe für die überlagerte Dreh- und Längsbewegung der Spielstangen. Die Rotation wird von einem elektrischen Servomotor (Typ: Beckhoff AM3032-0D30-0000) bewerkstelligt, die Linearbewegung übernimmt ein Linearmotor mit zylindrischer Achse (Typ: Copley STA2504P-516-S-S3F). Pro Spielstange ist jeweils ein Rotations- und ein Linearmotor verbaut, dies ergibt insgesamt acht Motoren die von vier Zweikanal-Servoverstärkern (Typ: Beckhoff AX5206 mit Safety-Option AX5801 ) gespeist werden. Die Drehung der Rotationsmotoren wird auf ein ein Vierkant-Rohr übertragen, in dem sich die Spielstange teleskopisch bewegt.

Aktorik

Rotationsmotoren

Linearmotoren

Servoverstärker

Zeichnung





Gegner-Erkennung
Die Stellungen der Spielstangen des menschlichen Spielers ermitteln wir jeweils mit Hilfe von zwei Laser-Distanz-Sensoren (Typ: Baumer OADM 13U7480/S35A). Dafür sind an den Enden der Stangen Kunststoff-Schnecken angebracht. Die Schnecken werden mit einem Sensor an der Fläche in der Mitte und mit dem anderen Sensor an der umlaufenden schiefen Ebene abgetastet. Aus der Distanz zwischen Laser-Sensor und der Mitte der Schnecke, bestimmen wir die Position der Stange in Längsrichtung. Aus der Differenz der Distanz in der Mitte und der Distanz zur umlaufenden Ebene berechnen wir den Winkel der Spielstange.

Gegner-Erkennung mit Laser-Distanzsensoren

CAD-Zeichnung einer Schnecke

Vergleich altes und neues Design der Schnecken



Ballerkennung
Um die Position des Balles zu bestimmen, haben wir zwei Kameras (Typ: VRmagic VRmFC-12/BW) in zwei Ecken des Spielfeldes montiert. Diese beobachten das Spielfeld durch einen schmalen Schlitz in der Bande. Bereits auf den Kameras selbst werden die Bilder vor bearbeitet, so dass die Software nur noch einen schmalen schwarzen Streifen mit einem weißen Fleck (Ball) auswerten muss.

Embedded-Kamera

Kamera montiert
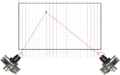
Positionierung der Kameras



Spielstandsanzeige
Torerkennung
Die gefallenen Tore werden bei uns automatisch gezählt. Hierfür sind in jedem Tor Lichtschranken verbaut, die beim Passieren eines Balles unterbrochen werden. Die Auswertung der Lichtschranke erfolgt mit der SPS.