Hardware: Unterschied zwischen den Versionen
(Neue Seite "Hardware") |
|||
| (16 dazwischenliegende Versionen von 2 Benutzern werden nicht angezeigt) | |||
| Zeile 1: | Zeile 1: | ||
{{Navigation|hardware=underline}} |
{{Navigation|hardware=underline}} |
||
== Aktorik == |
|||
== Hier entsteht die neue Seite ''Hardware''== |
|||
Eine große Herausforderung bei der Umsetzung des Projekts war die Realisierung der Antriebe für die überlagerte Dreh- und Längsbewegung der Spielstangen. Die Rotation wird von einem elektrischen Servomotor (Typ: [http://beckhoff.de/ Beckhoff] AM3032-0D30-0000) bewerkstelligt, die Linearbewegung übernimmt ein Linearmotor mit zylindrischer Achse (Typ: [http://www.copleycontrols.com/ Copley] STA2504P-516-S-S3F). Pro Spielstange ist jeweils ein Rotations- und ein Linearmotor verbaut, dies ergibt insgesamt acht Motoren die von vier Zweikanal-Servoverstärkern (Typ: [http://beckhoff.de/ Beckhoff] AX5206 mit Safety-Option AX5801) gespeist werden. Die Drehung der Rotationsmotoren wird auf ein ein Vierkant-Rohr übertragen, in dem sich die Spielstange teleskopisch bewegt. |
|||
<gallery> |
|||
Datei:Aktorik_Zeichnung.jpg|Modell |
|||
Datei:Prock_overview_mechanik.JPG|Gesammtansicht |
|||
Datei:Rotation.JPG|Rotationsmotoren |
|||
Datei:Translation.JPG|Linearmotoren |
|||
Datei:Verstaerker.JPG|Servoverstärker |
|||
</gallery> |
|||
== Gegnererkennung == |
|||
Die Stellungen der Spielstangen des menschlichen Spielers ermitteln wir jeweils mit Hilfe von zwei Laser-Distanzsensoren (Typ: [http://www.baumer.com Baumer] OADM 13U7480/S35A). Dafür sind an den Enden der Stangen Kunststoff-Schnecken angebracht. Mit den Sensoren messen wir die Distanzen zum Schneckenmittelpunkt und zur umlaufenden Ebene. Aus der Distanz zwischen Laser-Sensor und dem Schneckenmittelpunkt, bestimmen wir die lineare Position der Stange. Aus der Differenz der beiden gemessenen Distanzen berechnen wir den Winkel der Spielstange. |
|||
Übrigens, die Schnecken wurden im hausinternen [http://www.me.hm.edu/fakultaet/verbundlabore/kca/rpm Rapid Prototyping und Rapid Manufacturing Labor] gefertigt. |
|||
<gallery> |
|||
Datei:Gegnererkennung_neu.jpg|Gegnererkennung mit Laser-Distanzsensoren |
|||
Datei:Schnecke isometrisch.png|CAD-Zeichnung einer Schnecke |
|||
Datei:Schnecken alt neu.JPG|Vergleich altes und neues Design der Schnecken |
|||
</gallery> |
|||
== Ballerkennung == |
|||
Um die Position des Balles zu bestimmen, haben wir Kameras (Typ: [http://www.vrmagic.com VRmagic] VRmFC-12/BW) in zwei Ecken des Spielfeldes montiert. Diese beobachten das Spielfeld durch einen schmalen Schlitz in der Bande. Bereits auf den Kameras selbst werden die Bilder vor bearbeitet, so dass die [[Software#Ballerkennung|Software]] nur noch einen schmalen schwarzen Streifen mit einem weißen Fleck (Ball) auswerten muss. Dies geschiet mittels Triangolation. |
|||
<gallery> |
|||
Datei:Embedded Kamera.JPG|Embedded-Kamera |
|||
Datei:Kamera_montiert.JPG|Kamera montiert |
|||
Datei:Ballerkennung_Kamerapositionierung.png|Positionierung der Kameras |
|||
</gallery> |
|||
== Spielstandanzeige == |
|||
Damit der Kicker nicht nur technisch, sondern auch optisch was hermacht, haben wir eine Spielstandanzeige gebaut. Sie kann zwei zweistellige 7-Segment-Ziffern darstellen und besteht aus 336 handverlöteten LEDs. Während des Spiels wird natürlich der Spielstand (Mensch:Computer) angezeigt, wenn gerade nicht gespielt wird, wird die Uhrzeit dargestellt. |
|||
<gallery> |
|||
Datei:Kicker vorne Spielstandsanzeige.JPG|Spielstandanzeige oben, die Uhrzeit wird angezeigt |
|||
Datei:Schaltung Spielstandanzeige.JPG|Schaltung der Spielstandanzeige |
|||
</gallery> |
|||
== Sicherheitstechnik == |
|||
Wie in der Industrie, muss auch unser Kicker - als autonomes System - mit entsprechender Sicherheitstechnik ausgerüstet sein. Am Gerät befinden sich insgesamt vier Notaus-Schalter, zwei vorne am Spieltisch, einen an der Bedieneinheit und einen frei platzierbaren. Eine Lichtschranke (Typ: [http://www.sick.com sick] miniTwin2) über dem Spielfeld sorgt dafür dass alle Motoren sofort ausgeschaltet werden wenn jemand ins Spielfeld greift. Alle Sicherheitselemente werden über ein spezielles Sicherheitsrelais (Typ: [http://www.pilz.com/de-INT pilz] PNOZ XV2) geschaltet. |
|||
<gallery> |
|||
Datei:Notausknopf Lichtgitter.JPG|Notaus-Schalter mit Lichtgitter dahinter |
|||
Datei:Bedieneinheit.JPG|Bedieneinheit mit Notaus-Schalter |
|||
Datei:Sicherungen.jpg|Elektroverteilung mit Sicherungen |
|||
Datei:Pilz Sicherheitsrelais.JPG|Sicherheitsrelais |
|||
</gallery> |
|||
== Torerkennung == |
|||
Die gefallenen Tore werden bei uns automatisch gezählt. Hierfür sind in jedem Tor Lichtschranken verbaut, die beim Passieren eines Balles unterbrochen werden. Die Auswertung der Lichtschranke erfolgt mit der [[Software#TwinCAT|SPS]]. |
|||
Aktuelle Version vom 2. Oktober 2013, 13:36 Uhr
HomeNewsHardwareSoftwareBilderÜber uns
Aktorik
Eine große Herausforderung bei der Umsetzung des Projekts war die Realisierung der Antriebe für die überlagerte Dreh- und Längsbewegung der Spielstangen. Die Rotation wird von einem elektrischen Servomotor (Typ: Beckhoff AM3032-0D30-0000) bewerkstelligt, die Linearbewegung übernimmt ein Linearmotor mit zylindrischer Achse (Typ: Copley STA2504P-516-S-S3F). Pro Spielstange ist jeweils ein Rotations- und ein Linearmotor verbaut, dies ergibt insgesamt acht Motoren die von vier Zweikanal-Servoverstärkern (Typ: Beckhoff AX5206 mit Safety-Option AX5801) gespeist werden. Die Drehung der Rotationsmotoren wird auf ein ein Vierkant-Rohr übertragen, in dem sich die Spielstange teleskopisch bewegt.

Modell

Gesammtansicht

Rotationsmotoren

Linearmotoren

Servoverstärker





Gegnererkennung
Die Stellungen der Spielstangen des menschlichen Spielers ermitteln wir jeweils mit Hilfe von zwei Laser-Distanzsensoren (Typ: Baumer OADM 13U7480/S35A). Dafür sind an den Enden der Stangen Kunststoff-Schnecken angebracht. Mit den Sensoren messen wir die Distanzen zum Schneckenmittelpunkt und zur umlaufenden Ebene. Aus der Distanz zwischen Laser-Sensor und dem Schneckenmittelpunkt, bestimmen wir die lineare Position der Stange. Aus der Differenz der beiden gemessenen Distanzen berechnen wir den Winkel der Spielstange.
Übrigens, die Schnecken wurden im hausinternen Rapid Prototyping und Rapid Manufacturing Labor gefertigt.

Gegnererkennung mit Laser-Distanzsensoren

CAD-Zeichnung einer Schnecke

Vergleich altes und neues Design der Schnecken



Ballerkennung
Um die Position des Balles zu bestimmen, haben wir Kameras (Typ: VRmagic VRmFC-12/BW) in zwei Ecken des Spielfeldes montiert. Diese beobachten das Spielfeld durch einen schmalen Schlitz in der Bande. Bereits auf den Kameras selbst werden die Bilder vor bearbeitet, so dass die Software nur noch einen schmalen schwarzen Streifen mit einem weißen Fleck (Ball) auswerten muss. Dies geschiet mittels Triangolation.

Embedded-Kamera

Kamera montiert
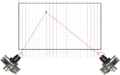
Positionierung der Kameras



Spielstandanzeige
Damit der Kicker nicht nur technisch, sondern auch optisch was hermacht, haben wir eine Spielstandanzeige gebaut. Sie kann zwei zweistellige 7-Segment-Ziffern darstellen und besteht aus 336 handverlöteten LEDs. Während des Spiels wird natürlich der Spielstand (Mensch:Computer) angezeigt, wenn gerade nicht gespielt wird, wird die Uhrzeit dargestellt.

Spielstandanzeige oben, die Uhrzeit wird angezeigt

Schaltung der Spielstandanzeige


Sicherheitstechnik
Wie in der Industrie, muss auch unser Kicker - als autonomes System - mit entsprechender Sicherheitstechnik ausgerüstet sein. Am Gerät befinden sich insgesamt vier Notaus-Schalter, zwei vorne am Spieltisch, einen an der Bedieneinheit und einen frei platzierbaren. Eine Lichtschranke (Typ: sick miniTwin2) über dem Spielfeld sorgt dafür dass alle Motoren sofort ausgeschaltet werden wenn jemand ins Spielfeld greift. Alle Sicherheitselemente werden über ein spezielles Sicherheitsrelais (Typ: pilz PNOZ XV2) geschaltet.

Notaus-Schalter mit Lichtgitter dahinter

Bedieneinheit mit Notaus-Schalter

Elektroverteilung mit Sicherungen

Sicherheitsrelais




Torerkennung
Die gefallenen Tore werden bei uns automatisch gezählt. Hierfür sind in jedem Tor Lichtschranken verbaut, die beim Passieren eines Balles unterbrochen werden. Die Auswertung der Lichtschranke erfolgt mit der SPS.